随着工业生产中对自动化的要求越来越高,视觉技术已被广泛引入工业机器人行业,具备视觉的工业机器人能更快、更准、更灵活地完成定位抓取、对位组装等。基于图像分析的视觉技术在机器人引导相关应用中的主要作用是***获取对象物(待抓取物体)和目标物(待组装物体)的坐标位置和角度,并将图像坐标转换为机器人能识别的机器人坐标,指导机器人进行纠偏和组装。手眼标定和定位引导是机器视觉在机器人引导中应用的的核心。在机器视觉与机器人相结合的应用中,机器人引导定位***为普遍。此类场景下,大致可分为单相机抓取定位引导、单相机纠偏引导、多相机贴合定位引导。
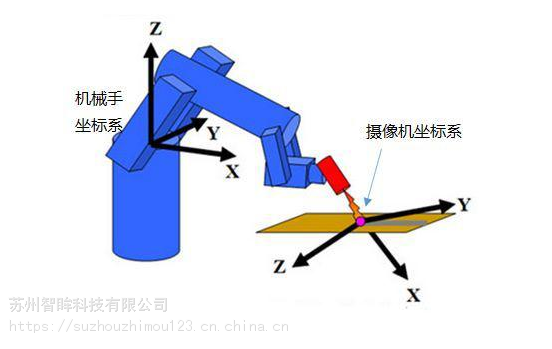
手眼标定原理:
所谓手眼标定,即将手(机械手)和眼(摄像机)的坐标系统一起来,解决相机与机械手之间的坐标转换关系,让机械手能***抓取到摄像机定位的目标。
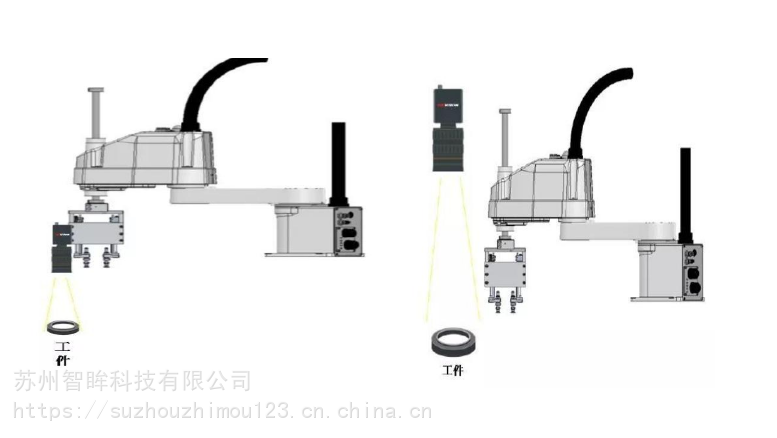
单相机抓取定位引导
上图即为单相机定位引导的场景,相机即可安装于机器人上,也可固定于机台上。通过相机拍摄产品,对其进行定位以便机器人根据定位信息抓取来料,如此可降低对工位间机构的准确性要求,确保抓取位置的一致性,从而做到产品***导向。
单相机纠偏引导
上图所示为单相机纠偏定位引导中,相机一般倒装并固定在机台上,通过视觉定位引导机器人纠正来料位置的波动,确保对每个来料进行精组装。
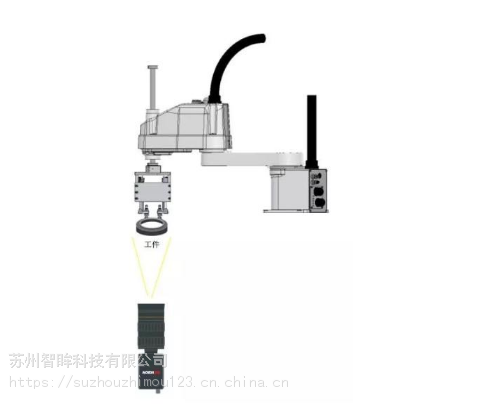
多相机贴合定位引导

如上图所示,该场景由多个相机组成,下相机倒装于机台上,用于对抓取的对象工件进行定位纠偏,上相机用于拍摄来料与目标产品位置,使得来料产品准确的与目标产品贴合。该系统可广泛应用于3C产品屏幕及电路板的生产组装等相关场景,如将膜与玻璃对齐贴合或将玻璃和偏光片对齐贴合等。
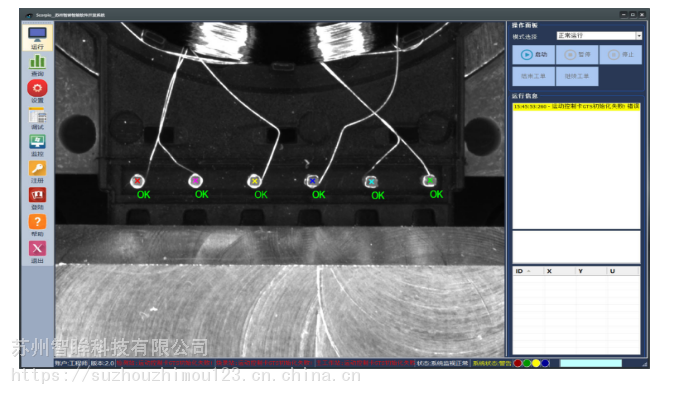
Scorpio视觉软件(新能源汽车中转子的焊接定位引导)
Scorpio软件是苏州智眸科技针对工业自动化行业定制的一款多功能视觉软件,可针对不同情况下的定位要求,对机械结构和机器人进行定位引导,使产品在制造装配中精度更高、更换产品类型时更灵活。下面的案例是新能源汽车中转子焊接的视觉定位引导: